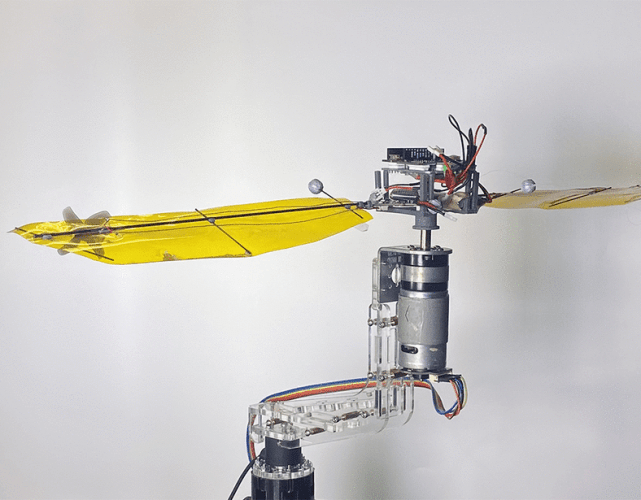
在小型旋翼机中,明显的空气动力学表面和延迟的失速被认为是高效无动力飞行的关键。在这里,采用生物启发原则,通过萨马拉启发的机器人显着降低小型飞行器的功耗。科研人员研发一架双翼35.1克飞机,能够通过动力回转进行悬停飞行。配备两个转子,带有超大旋转机翼的驱动机器人,旨在利用不稳定的空气动力学,经过优化以提高飞行效率。通过对飞行动力学和稳定性的分析,该飞行器被设计为被动姿态稳定性,消除了保持直立的快速反馈的需要。为此,与基准多旋翼机器人相比,无人机的飞行功耗降低了两倍。该车辆的功率负载为每瓦8.0克,飞行时间为14.9分钟,配备更大的电池时可达24.5分钟。利用快速旋转运动来克服严重的驱动不足,我们还实现了位置控制飞行,并演示了21.5克有效载荷的测绘和监视应用示例。
更多人工智能机器人技术,请上科企岛